Current research projects
 |
Reading facial expressions from distal facial EMG signals Facial expressions play a significant role in interpersonal information exchange by providing additional information about the emotional state or intention of the person displaying them. The purpose of this study is to create an emotion reading system that can recognize the subject’s emotions in real-time and be able to display the output in different formats using the facial surface electromyographic (EMG) signals. It must be unobtrusive to the user, not inhibit expressions and work in any environment and position of the subject. This work proposes using EMG signals captured on areas on the side of the face making emotion reading unobtrusive. The classification method combines Independent Component Analysis (ICA) and an Artificial Neural Network (ANN). Applications: communication aid to improve human-human communication, therapy and assistive technology, quantitative smile evaluation during smile training, aid the visually impaired, distance communication and computer games, increasing the quality of life for patients suffering from facial paralysis using a Robot Mask. This study was supported in part by Grants-in-Aid for Scientific Research, MEXT, Japan; the Global COE Program on "Cybernics: fusion of human, machine, and information systems; BAMIS Center, University of Tsukuba. |
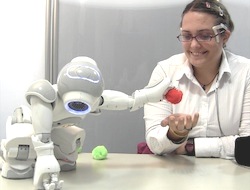 |
Emotionally assisted interaction We present a new way for human-robot interaction, where a robot is able to receive continuous physiological affective feedback for its actions from a human trainer and learn from it. We capture the human trainer’s facial expressions using a wearable device. The robot learns in a manner modeled after the way children learn from their parent’s encouragement or reproach. As robots become progressively more integrated into human environments, the ability to behave correctly in different and complicated situations and interact naturally with humans becomes necessary. Applications: in social robotics because our research shows that interaction between humans and robots is possible using continuous non-verbal social cues, which are characteristic for human-human interaction and for robots in human environments. This study was supported in part by the Global COE Program on "Cybernics: fusion of human, machine, and information systems.” |
Previous research projects
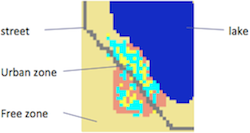 |
Visualizing urban growth using bidimensional cellular automata Bachelor Thesis (Universidad Metropolitana, Caracas, Venezuela) |